제어계측공학전공
전기공학부
제어계측공학전공
Major of Control and Instrumentation Engineering
TEL : 051-629-6307
FAX : 051-629-6333
제어계측공학은 현대 산업의 기간 기술인 전기전자공학, 기계공학, 컴퓨터공학 등을 응용하여 최첨단 센서, 로봇공학, 메카트로닉스, 바이오시스템 등을 다루는 융합학문이다. 부경대학교 제어계측공학전공은 고급 기술인력 양성에 교육목표를 두고 부가적으로 전기·전자 교직과정을 운영하고 있다. 우리 전공은 인공 지능(AI), 사물 인터넷(IoT) 등 첨단 정보통신기술이 경제·사회 전반에 융합되는 4차 산업혁명시대에 필요한 요소기술을 교육과정에 적극적으로 반영하여 고부가가치 인력을 필요로 하는 사회에 발맞춰 인재를 양성하고 있다.
교육목표

수학, 기초과학, 공학지식 학습을 통하여 평생 자신의 능력을 발전시켜 나갈 수 있는 실력을 배양한다.
다양한 전공교육을 통하여 공학적 문제 인식 및 창의적 설계능력을 배양한다.
팀워크를 통한 책임의식을 고양하고 글로벌 시대에 적합한 리더쉽을 배양한다.
졸업 후 진로
전기, 전자, 기계공학을 기반으로 반도체, 로봇 등과 관련된 분야의 기술자 및 연구원으로 크게 기여한다.
현재 산업의 핵심분야인 자동제어, 계측 및 자동화 분야를 담당하는 공기업, 연구소 등에 진출하여 활발한 활동을 펼치고 있다.
취득자격증
전기(공사)기사 전기(공사)산업기사 소방설비기사(전기) 전자기사 전자산업기사 무선설비기사 무선설비산업기사 정보통신기사정보통신산업기사 통신선로기사 통신선로산업기사 방송통신기사 방송통신산업기사 전자계산기기사 정보처리기사 정보처리산업기사전파전자통신기사 전파전자통신산업기사 계측제어기사 전기철도기사 철도신호기사 등
교수진
| 교수명 | 전공 | 이메일 |
|---|---|---|
| 김남호 | 전자공학, 전자통신 | nhk@pknu.ac.kr |
| 황용연 | 로봇공학 | yyh@pknu.ac.kr |
| 김만고 | 전력전자 | mgkim@pknu.ac.kr |
| 이경창 | 기계공학, 제어 및 자동화 | gclee@pknu.ac.kr |
| 곽성우 | 제어공학, 고신뢰도 시스템 | ksw@pknu.ac.kr |
| 이춘권 | 신호처리, 계측공학 | ck.lee@pknu.ac.kr |
| 최우영 | 제어이론, 자율주행 | wychoi@pknu.ac.kr |
연구실 소개
Major of Control and Instrumentation Engineering
소개 및 분야안내
-
계측 및 DSP 연구실
계측 및 디지털 신호처리
회로 및 계측 시스템
디지털 신호의에지 검출 및 노이즈 제거 등에 관한 연구
비선형 디지털 필터 연구
통신 시스템 및 스마트 농장을 위한 신호처리
의공학 관련 생체 신호처리
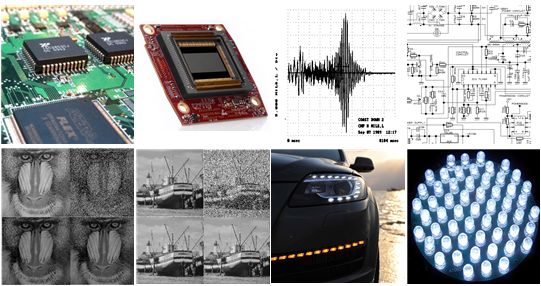
본 연구실은 제어대상으로부터 발생하는 진동, 변위, 온도 등의 물리량을 센서를 통해 전기 신호로 변환하여 특성을 분석하는 회로 및 계측 시스템(Circuit &Measurement Systems)과 신호를 분석하여 시스템에 적용하기 위한 디지털 신호처리(Digital Signal Processing)에 관련하여 연구하고 있습니다.
회로 및 계측 시스템과 관련된 연구로는 각종 센서의 출력 안정화를 위한 디지털 필터 연구 및 각종 센서 기술들이 접목된 스마트 하우징 시스템, 스마트 팜, 스마트 팩토리 기술 등을 연구 개발하고 있으며, 디지털 신호 처리 분야에서는 금속 기자재의 표면 결함 검사 시스템, 다양한 잡음 환경에서 영상 신호의 잡음을 제거하기 위한 필터 알고리즘, 의공학 관련 시스템의 생체 신호처리를 위한 연구를 수행하고 있습니다.
보유 장비로는 Spectrum Analyzer, 회로망 분석기(Network Analyzer), Digital Oscilloscope 및 각종 DSP 보드 등을 보유하고 있습니다.
-
로봇 제어 연구실
로봇제어
로봇 매니퓰레이터의 설계 및 제어
로봇의 위치/힘 제어
지능제어
학습제어
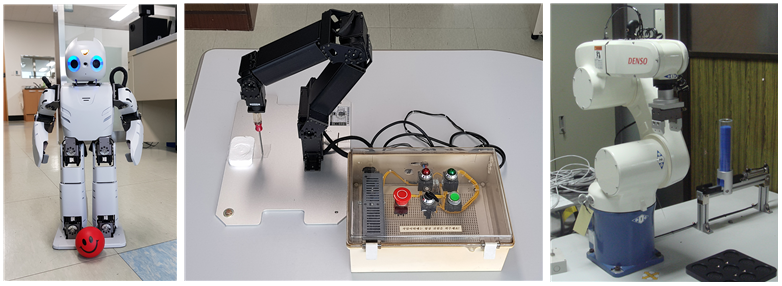
본 연구실에서는 간단란 로봇매니퓰레이터의 설계, 제작을 비롯하여 각종 제어이론을 실제 로봇으로의 적용에 관한 학습을 하는 연구실입니다. 주요 연구분야로는 로봇제어 알고리즘의 구현을 기초로 하여 인공지능 제어에 의한 로봇의 위치 및 힘 제어, 학습 제어, 공장 자동화를 위한 로봇시스템 개발 등입니다. 주요 연구장비로는 로봇 제작에 필요한 선반, 밀링 등 여러 가지 가공장비와 수직 다관절 로봇, 수평 다관절 로봇, 직교좌표형 로봇, 유공압 실험 장치 등을 보유하고 있습니다.
-
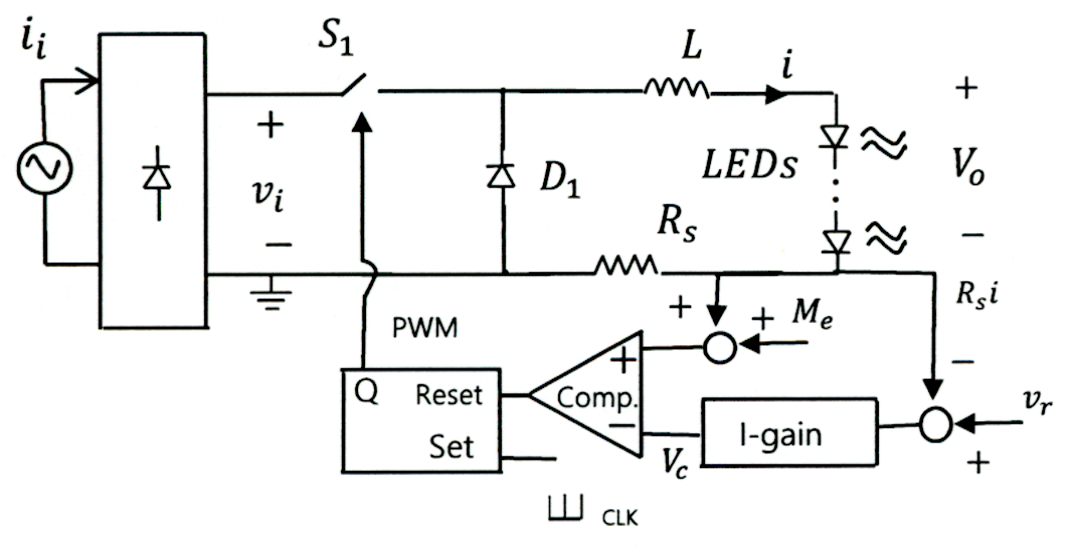
전력전자제어 연구실
Two-transistor 포워드컨버터에서 소프트스위칭 기법의 손실 분석
고밀도 전력 변환기
고주파 트랜스포머 / 인덕터 설계
전력변환기의 모델링 및 설계
공진형컨버터
본 연구에서는 Two-transistor 포워드컨버터에서 사용 가능한 기존의 소프트스위칭기법과 새로운 소프트 스위칭 기법의 손실 분석을 수행한다. 두 트랜지스터에서 발생하는 스너버 전류에 의한 트랜지스터 손실과 내부 커패시터에 의한 턴-온 손실을 유도하고, 각각의 트랜지스터에서 발생하는 전체 손실을 계산한다. 손실 계산을 통해 기존의 소프트스위칭기법에서는 두 트랜지스터에서 발생하는 손실이 상이함을 보이고, 새로운 소프트 스위칭 기법에서는 손실이 적으면서도 두 트랜지스터에서의 손실이 고르게 발생함을 알 수 있다. 그리하여 제안된 소프트스위칭 스너버를 사용하여 고른 열분포와 향상된 신뢰도를 얻을 수 있음을 보인다.
-
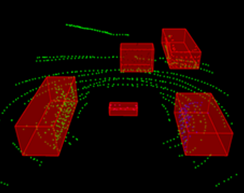
로보틱스 및 자율시스템 연구실
로봇의 인지, 판단 및 로봇 자동화에 관한 기술 연구
로봇 자동화를 위한 임베디드 시스템
딥러닝 기반 머신비전
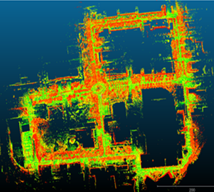
모바일 로봇과 자율주행차량을 위한 SLAM/Object Detection
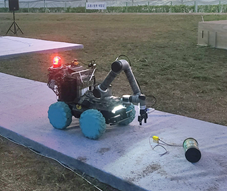
협동 로봇 및 모바일 매니퓰레이터의 충돌 회피 제어, 심층강화학습 기반 빈 피킹
스마트 공장에서의 머신러닝 기반 고장 예지 기술(PHM)
딥러닝 기반 머신비전 연구로는 수중 영상 개선 기술, 양식장 관리를 위한 그물 파손 검출, 폐사어 감지에 관한 연구를 수행하고 있고, 지능형 함 승조원 추락 자동 감시 및 익수자 구조시스템을 개발하고 있습니다.
자율주행 기술 연구로서는 차량 범퍼 장착형 Dual LiDAR 기반의 SLAM에 관한 연구와 LiDAR & Camera & GPS 등 다양한 센서 퓨전을 통하여 실외 위치추정 및 장애물인지에 관한 연구를 수행하고 있습니다. 협동 로봇 기술 연구로는 심층강화학습 기반 그리퍼의 파지점 인식 및 제어에 관한 연구를 수행하고 있습니다.
고장 예지 기술로는 스마트 공장과 로봇, 고장기계 등의 고장을 사전에 예측할 수 있는 머신러닝 기반 고장 예지 및 건전성관리(PHM, Prognostics & Health Monitoring)에 관한 연구를 수행하고 있습니다.
-
컴퓨터응용제어 연구실
컴퓨터 응용 제어
고신뢰도 시스템
우주용 전자회로 설계
자율주행자동차
컴퓨터응용제어 연구실은 디지털 컴퓨터를 이용하여 시스템을 제어 또는 고장을 극복하는 방법을 연구를 하고 있다.
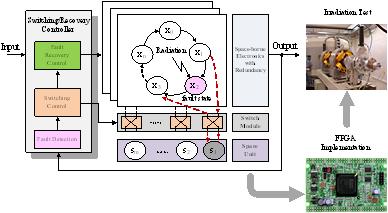
1. 고신뢰도 시스템
- 비동기 제어 기법을 이용한 고장 탐지 및 극복
- 실시간 제어 태스크 스케줄링
- 신뢰도 해석
2. 우주용 전자회로 설계
- 방사선 고장 탐지 및 극복 기법
- FPGA 기반 우주용 디지털 회로 설계
3. 자율주행자동차
- GPS와 차량 센서를 이용한 자율주행차 위치인식 등
-
지능형고장예측진단 연구실
지능형 고장 예측진단 연구
종합 전력설비 진단 솔루션
상태 계측장비 및 센서 개발
신호 처리 및 통계 분석 기법
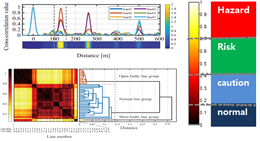
본 연구실은 계측공학 기반의 전력설비의 결함 진단 및 상태 모니터링, IoT 빅데이터 분석 등 기법을 활용하여 설비를 진단, 고장 예후를 검출하고 분석하는 연구를 하고 있다.
1. 종합 전력설비 진단 솔루션
- 반사파 계측법 기반 케이블 진단 알고리즘 개발 (전기자동차, 공장로봇, HVDC, HTS, I&C 케이블)
- IoT 기반 설비 상태 모니터링 및 고장 예후 검출
- 상태기반 정비 기법 (Condition Based Maintenance)
- 기계학습 기반 상태 추정기법 개발
2. 상태 계측장비 및 센서 개발
- MATLAB/LABVIEW 기반 신호 분석 S/W 개발
- IoT 스마트센서 설계 (FPGA, DSP, ADC)
3. 신호 처리 및 통계 분석 기법
- 전력 설비 잔존수명 추정
- 설비 Health Index 산출
- 시간-주파수 분석 및 잡음 제거 필터링
.png)

-
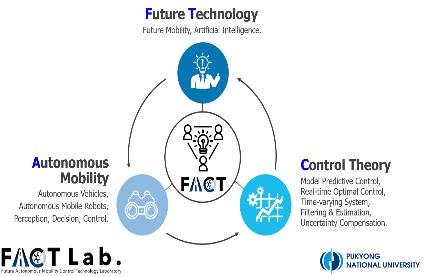
자율주행 모빌리티 연구실
자율주행 모빌리티 연구
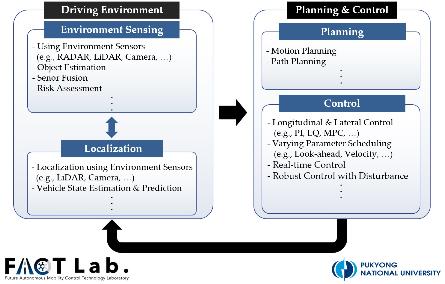
종방향 및 횡방향 통합제어 (Integrated Control of Longitudinal and Lateral Motion)
자율주행 추적제어 (Tracking Control for Autonomous Driving )
불확실성 보상에 의한자율주행 및 센서 시스템 (Autonomous Driving and Sensor Systems byUncertainty Compensation)
센서 융합 기반 주행 환경 인지 / 검출 / 추종 (Sensor Fusion Based Driving Condition Recognition / Detection / Tracking)
충돌 위험도 평가 및 장애물 회피 (Collision Risk Assessment / Obstacle Avoidance)
측위 기반 최적 전역&지역 경로 생성 (Localization Based Optimal Global & Local Path Planning)
AI 기반 어플리케이션 (AI-based Application)
인간-로봇 상호 작용 (Human-Robot Interaction)
자율주행 시스템 고장허용기법 (Fault-tolerant method for Autonomous Driving Systems)
소프트웨어 및 하드웨어 시스템 모의 실험 및 검증 (SILS & HILS, SW & HW Systems Simulation and Verification)
실제 차량 실험 및 검증 (Actual Experimental Vehicle Test and Verification)
제어 이론 (Control Theory)
FACT Lab. (FutureAutonomous mobilityControlTechnology laboratory)은 다양한 제어 이론(Model Predictive Control,Real-timeOptimal Control,Time-varying System Control,Filtering&Estimation, Uncertainty Compensation 등)을 기반으로Autonomous Vehicles and Robots에 적용하는 기술을 보유하고 있으며, 미래 자율주행 모빌리티의 기술 발전에 기여하는 것을 목표로 합니다. 주요 연구는 아래와 같으며, 자세한 내용은 홈페이지: https://sites.google.com/view/lab-fact/ 에서 확인할수 있습니다.